Robotépítés II.
Ez egy könnyen irányítható robot, 'tank'-hajtással.
Kettő darab bipoláris léptetőmotor hajtja meg a szerkezetet.
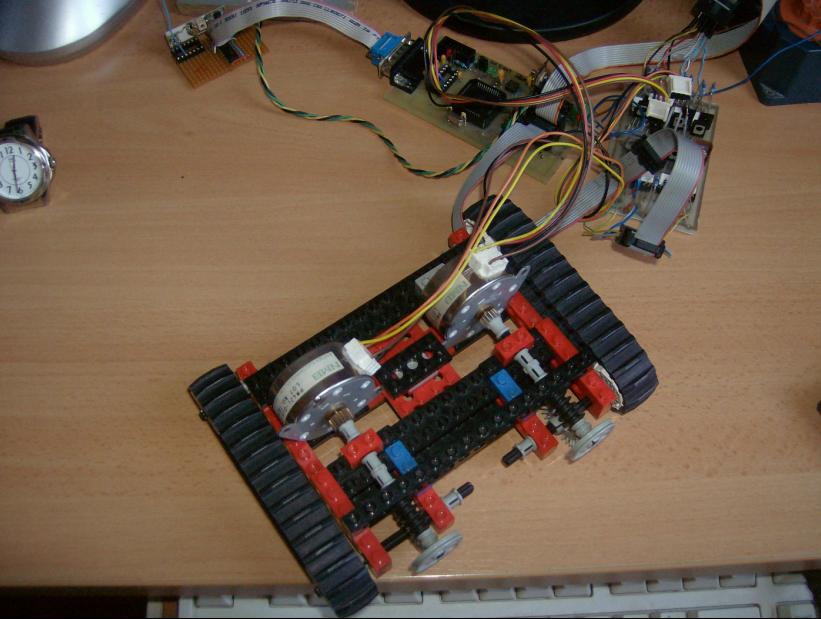
Az alábbi képen félkész állapotban van. a motorokat működtető mikrovezérlő a képen egy Atmel 89S52-es kontroller. A terv az, hogy egy Nexis 2-es FPGA áramkörre váltom le a mikrovezérlőt. A vezeték nélküli kommunikációt egy 433MHz-es adó-vevő modulpárral oldottam meg. Ezen keresztül kapja a robot a PC-ről soros adatokat.
egy videó róla működés közben, de még félkész állapotban:
(ha sötét képet látnál, az azért van mert Kodec kell hozzá, mivel fényképezővel vettem fel. )
ajánlott Kodec: K-Lite Codec Pack Full 5.0.5
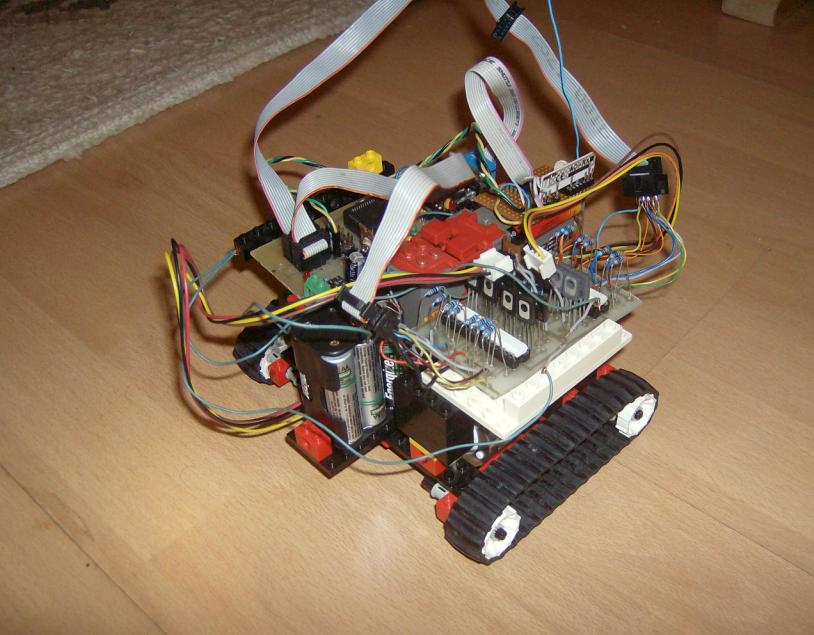
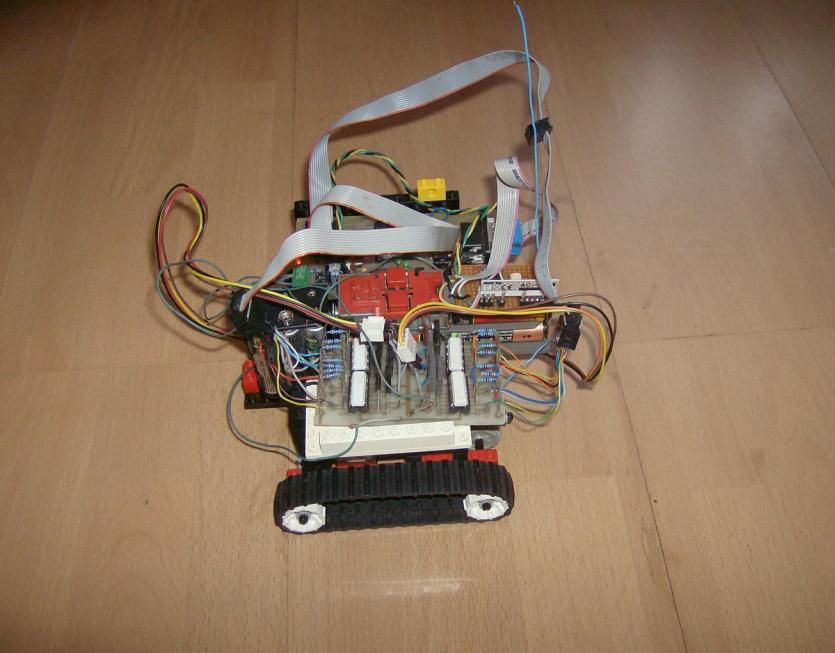
Itt ujra a prototipus látható, rápakolva a robotra a sok áramkör, meg elemek.
ÉÉS egy újabb videó működés közben:
A legújabb videó működés közben felülről, PC-irányítja egy programmal (köszi Beorg!! ):
A lánctalpas robotot itt befelyeztem, nagyobb lánctalpas robotot szerettem volna, ez a konstrukció csak szemléltetésként született, és jómagam szórakoztatására, tesztelgetésre.
Belekezdtem egy másféle robotba, később azt is felteszem.
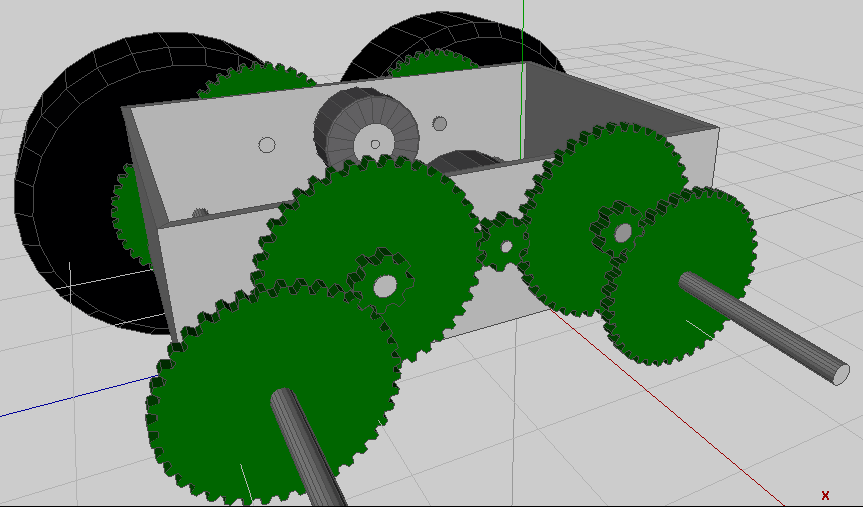
Tervek (csak mórickarajz)
Folytatás egyszercsak
<=Vissza
.